VANNJET
Station keeping mode er en posisjoneringsmodus og Virtual Anchor mode er et virtuelt anker. Med disse frigjør du tid og krefter til andre oppgaver.
JETanchor er et suppliment til Blue Arrow og leveres sammen med en ny type Mouseboat (Hamiltons maøvrerings joy-stick), kontrollboks og GPS-antenne. Modulen tilfører mange muligheter samtidig som du opprettholder de eksisterende fordelene du har ved BlueArrow.
 JETanchor gir deg følgende fordeler:
JETanchor gir deg følgende fordeler:
En presis posisjonering som det ikke er mulig å oppnå manuelt
Betydelig arbeidsbesparende
Mindre slitasje av mannskap og lavere støynivå
Reduserer antall mannskap på vakt
Innebygget GPS-posisjonering med høy nøyaktighetsgrad egnet for ROV, dykkeoppdrag, fiske etc.
Redusert drivstofforbruk
Økt sikkerhet
Patentert
Applikasjoner
Velegnet til alle kommersielle applikasjoner, men spesielt Persontransport, Losbåter, SAR, Vindfarm, Patrulje og Fiskebåter For twin-installasjon Opp til 3 styreposisjoner
Fordeler
Posisjoneringsmodus gjør det enkelt for mannskapet å holde båten i en bestemt retning og posisjon. Det virtuelle ankeret holder båten opp mot vær og vind i forhold til et satt punkt 15m foran båten. Dette gir mannskapet en komfortabel situasjon mens de er i ventemodus. Mouseboat-modulen gjør at all manøvrering enkelt kan utføres med en hånd.
Station keeping mode
Systemet holder båten i den retning og posisjon båten har ved aktivering. I denne modusen kan operatøren endre retning og posisjon på båten, en endringen som lagres fortløpende. Dette gjør det mulig å optimalisere fartøyets posisjon uten å gå inn og ut av systemet.
(Klikk på bildelinken nedenfor å se hvordan dette fungerer i praksis)

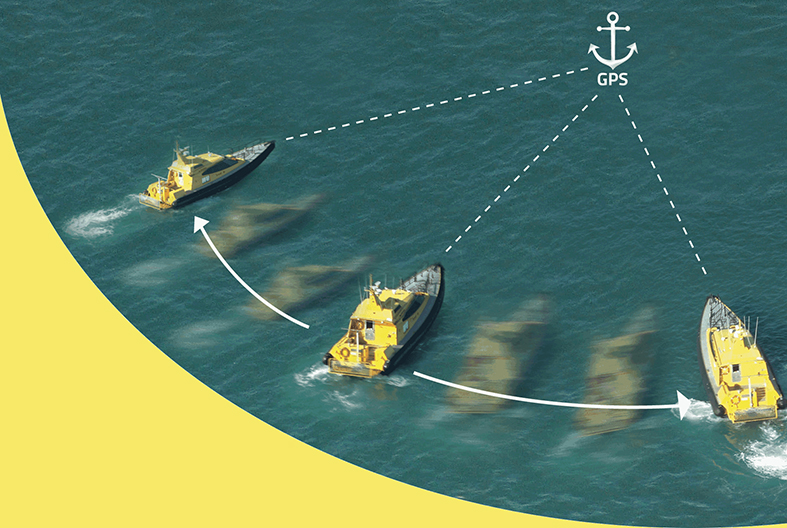
Virtual anchor mode
Det virtuelle ankeret lar deg rotere med vind, strøm og bølger rundt er gitt GPS-punkt.
Fartøyet holdes i posisjon med lav motorkraft og minimalt forbruk og høy komfortgrad for mannskapet.
Manøvrerings mode
I manøvrerings-modus kan operatøren enkelt og intuitivt manøvrere båten i ønsket posisjon og retning med bruk av en hånd. Mouseboatmodulen har funksjoner som forover-revers, styrbord-babord, side-veis forskyvning, rotasjon og turtall
Thrust hold mode
Ved bruk av Hold-funksjonen vil systemet holde den bevegelsen du har satt systemet til å gjøre. Setter du båten opp mot noe, feks en brygge, vil hold-knappen sikre denne bevegelsen inntil du igjen berører Mouseboatmodulen.
(Klikk på bildelinken nedenfor)

Systemet er utviklet og testet på to kommersielle fartøy i en periode på 2 år. RAWINIA er en skyssbåt som jobber standby for oljerigger og 1070 Survey er et lite forskningsfartøy.
 Last ned brosjyre
Last ned brosjyre  Last ned brosjyre
Last ned brosjyre
![]()