VANNJET
Oppbygging av vannjetaggregatet
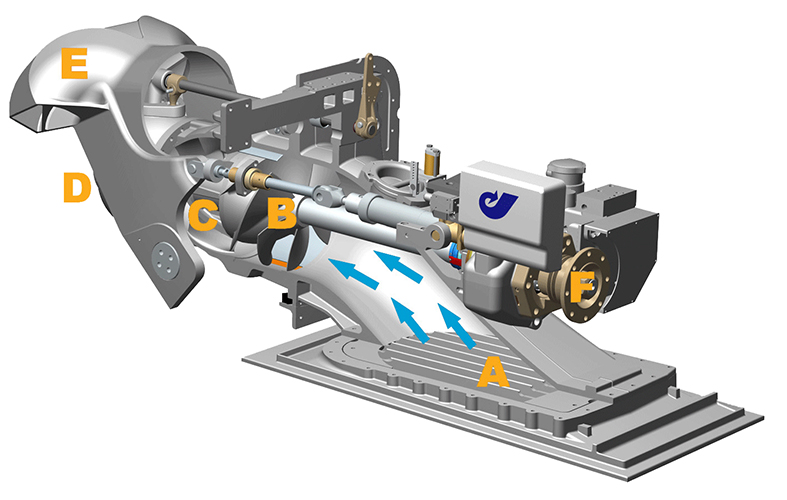
Oppbygging av vannjetaggregatet og funksjonsmåte, fungerer i prinsippet som en pumpe som suger inn vann under båten og pumper det ut akterut, og således får båten til å gå framover. Over vanninntaket i bunnen er det en rist (A) som hindrer at større gjenstander som kan ødelegge aggregatet suges inn. Fra vann- inntaket ledes vannet i en kanal til impelleren (B) (pumpehjulet). Denne er drevet av motoren, og den er nøye tilpasset motorens omdreiningstall og effekt. Impelleren pumper vannet ut bak båten i en stråle gjennom statorhuset (C) og styredysen (D) med stor fart og kraft. På denne måten skapes det en kombinasjon av skyv- og trekk-kraft som presser båten framover. For å manøvrere og reversere benytter man en kombinasjon av styredysen (D) og reverseringsskjoldet (E)
 JT-styredyse
JT-styredyse
En av de største forskjellene mellom Hamilton og andre vannjet-leverandørerer er den patenterte JT-Styredysen. JT er et “ball-joint” system som tar hele vannstrålen som genereres gjennom jetten og svinger denne. Man kan sammenligne det med å ta hageslangen og endre kurs ved å føre denne i ønsket retning, mens man ved andre systemer forandre retning ved å stikke hånden inn foran vann-strålen. JT-dysen medfører minimalt tap og en meget effektiv styring.
Som nevnt er andre styredyser basert på at vannet i større eller mindre grad treffer styreenheten som et ror. For at dette ikke skal begrense den generelle fremdriften må gapet mellom dysen og “ror-systemet” være ganske stort. Dette medfører en dødgang når man manøvrerer, noe som ikke gjør det mulig å oppnå den presise og raske kontrollen man får ved en Hamilton JT-styring. En annen meget viktig faktor i dette er at når man beveger disse rorkonstruksjonene inn i vannstrålen vil en stor del av vannet presses tilbake i motsatt retning. Se illustrasjon. Dette skaper mot-krefter som virker mot de framdriftskreftene som genereres i jetten. Du vil derfor tape betydelig mer fart når du manøvrer. Tester gjort med og uten JT-styingen viser en signifikant drivstofforbruksbesparelse
Reverseringssystemer
Reversering skjer ved at man senker reverseringsskjoldet over vannstrålen. I forover er denne i stilling 1 og påvirker ikke vannstrålen. Nården senkes og kommer til posisjon 2, er vannstrålen rettet rett ned, og båten ligger stille. Går man videre til posisjon 3, snur reverseringsskjoldet vannstrålen slik at den går inn under båten, og skyver båten akterover. Dermed har man oppnådd en trinnløs overgang fra forover og til revers uten marinegear. Styringen, i revers, foregår ved at vannstrålen går gjennom styredysen, slik at man svinger vannstrålen inn i reverseringsskjoldet, og på den måten manøvrere båten. (Se neste avsnitt) Dysen er balansert, slik at den er meget lett-manøvrert
 Split duct reverse controll
Split duct reverse controll
Hamiltons «Split Duct» reverseringsskjold fungerer på den måten at når man senker skjoldet ned over vannstrålen fanges vannet opp og sendes i retur gjennom 2 tuneller. Står styredysen rett frem vil båten gå rett bakover. Vris styredysen mot en av sidene vil vannet gå gjennnom denne tunellen og skyve båten motsatt vei.
Hvorfor gjør Hamilton på denne måten?
Den enkleste årsaken er at styringen blir mer logisk. Har du singel, twin eller trippel vil all styringen gå til samme side. Andre patenter gjør at du må ha styredysene fra hverandre for å oppnå samme effekt som vi kan gjøre med en bevegelse, f.eks; når man manøvrerer sideveis. dette kombinert med JT-styredysen gjør at Hamilton har den raskeste manøvreringen på markedet.
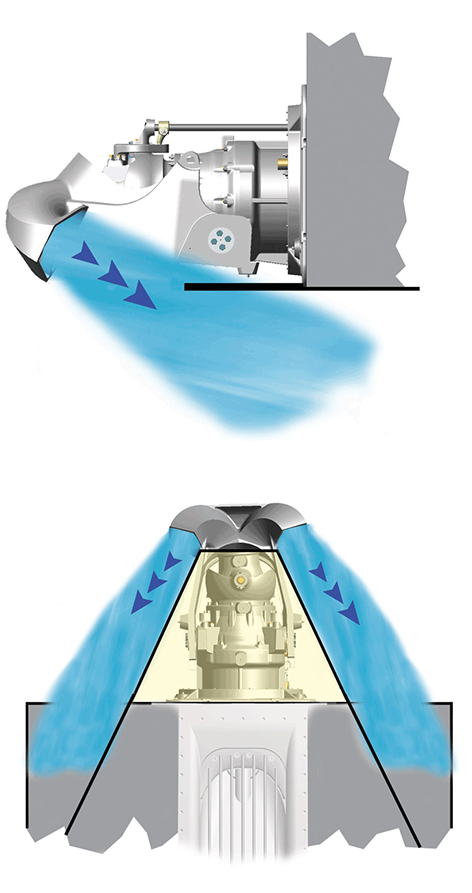
Den andre grunnen er at ved å styre det «brukte» vannet ut på siden vil man sikre at friskt og rolig vann kommer inn gjennom inntaksristen. Mange vannjet-leverandører sender vannet rett ned og fremover. dette gjør at vannet går i loop gjennom inntaket. Ulempen med dette er at du aldri får «rent» vann, men fullt av luft. dette demper effektiviteten betraktelig. Måten Hamilton gjør dette på med «split duct reverse controll! sørger for optimale krefter bakover.
Se video om oppbygging av vannjetaggregat